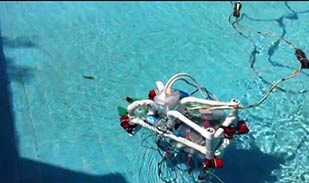
22 May ROV: Sea Spider
Sea Spider is the 3rd place winner in the MATE ROVER Egyptian Regional Competition, and winner of many awards....
me@menaeffat.com
Qism Sidi Gabir, Alexandria Governorate.
Closed on Sunday

Sea Spider is the 3rd place winner in the MATE ROVER Egyptian Regional Competition, and winner of many awards....

If you already read Controlling your RC Robot – Part 1 – Intro and Controlling your RC Robot – Part 2 – Doing the math you’d probably have the full picture of how the implementation should go. Yet, I’ve been asked many times about the code implementation, so here it...

Controlling your RC Robot – Part 2 – Doing the math On this article I will discuss the mathematical implementation of the formulas discussed on Controlling your RC Robot – Part 1 – Intro. So, let us start with the formulas: X' = X Cos(theta) + Y Sin(theta) Y' =...
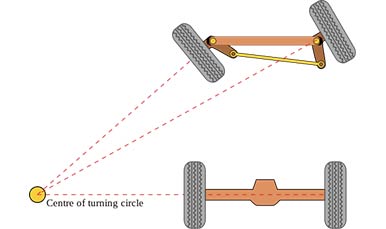
Most of robotic platforms use differential drive as opposed to Ackermann steering, as the differential drive has the leverage of zero-turn-radius that enables high maneuverability Ackermann Steering When designing a control scheme for the Ackermann steering, you have two motors; one is used for drive, the other...

I’ve been searching the internet for a way to use Arduino as a sim cable to use FMS instead of having to buy a ready made cable FMS and I’ve came by these links: –Arduino as flight simulator interface for any rc receiver –2.4Ghz Radio to Flight Simulator Interface Using Arduino I...